工業機器人培訓學校—工業機器人培訓機構—IRB360并聯機器人輸送鏈相關指令
時間:2021-07-14 15:03
來源:
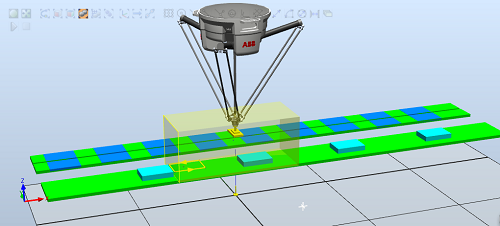
工業機器人編程專家表示,在工業生產中,經常使用IRB360并聯機器人和輸送鏈協同工作對產品進行分揀工作。對于ABB仿真軟件,有輸送鏈選項,可以把其他軟件做好的工作站導入仿真軟件,創建輸送鏈,協同機器人工作共同完成某些工作功能任務等。本節課主要了解IRB360機器人輸送鏈創建,走四邊形軌跡編程、取料放料編程,并調試運行。
輸送鏈相關指令
1.1 ActUnit - 啟用機械單元
ActUnit用于啟用機械單元。其可以用于確定,例如,當使用公共驅動單元時,應啟用哪一個單元。本指令僅可用于主任務T_ROB1,或者如果在MultiMove系統中,則可用于運動任務中。指令參數:ActUnit MechUnit,參數MechUnit是數據類型mecunit,待啟用機械單元的名稱。
舉例:
ActUnit orbit_a;
orbit_a機械單元啟用。
1.2 DeactUnit - 停用機械單元
DeactUnit用于停用機械單元。其可以用于確定,例如,當使用公共驅動單元時,應啟用哪一個單元。本指令僅可用于主任務T_ROB1,或者如果在MultiMove系統中,則可用于運動任務。當機械臂和外軸的實際路徑就緒時,清除當前路徑等級上的路徑,并停用指定的機械單元。這意味著既不對其進行控制,亦不對其進行監測,直至重新啟用為止。
舉例:
MoveL p10, v100, fine, tool1;
DeactUnit track_motion;
MoveL p20, v100, z10, tool1;
MoveL p30, v100, fine, tool1;
ActUnit track_motion;
MoveL p40, v100, z10, tool1;
當機械臂運動至p20和p30時,單元track_motion將固定。此后,機械臂與track_motion均將移動至p40


1.3 WaitWObj - 等待傳送帶上的工件
WaitWObj(Wait Work Object)連接至傳送帶機械單元起動窗口中的一個工件。工業機器人培訓哪家好?如果起動窗口中不存在任何對象,則程序執行進入等待。如果存在一個工件,則將對象與傳送帶相連,并繼續執行。
指令參數:WaitWObj WObj [ RelDist ][MaxTime][TimeFlag]
WObj:數據類型wobjdata,運動中的工件(坐標系)與指令中的機械臂位置相關。通過工件中的ufmec,指定機械單元傳送帶。
RelDist:數據類型num,等待一個對象進入起動窗口,并超出本參數指定的距離。如果已經連接工件,則執行等待,直至對象通過給定的距離。如果對象已通過RelDist,則繼續執行。
MaxTime:數據類型num,允許的最長等待時間,以秒計。
TimeFlag:數據類型bool,如果在實現對象連接或Reldist之前,耗盡最長允許等待時間,則包含該值的輸出參數為TRUE。
舉例1:
WaitWObj wobj_on_cnv1RelDist:=500.0;
如果未連接,則等待對象進入起動窗口,隨后,等待對象通過傳送帶上的500mm點。如果已經同對象相連,則等待對象通過500 mm。如果未連接,則等待起始窗口中的對象。
舉例2:
WaitWObj wobj_on_cnv1RelDist:=0.0;
如果已經連接,則當對象已經通過0.0 mm時,繼續執行。
舉例:3:
WaitWObj wobj_on_cnv1RelDist:=500.0MaxTime:=0.1 Timeflag:=flag1;
如果對象已通過500 mm,WaitWobj將立即返回,否則,將等待一個對象0.1秒。如果在這0.1期間,無對象通過500 mm,則當標志1=TRUE時,本指令將返回。
1.4 DropWObj - 使工件落于傳送帶上
DropWObj(Drop Work Object)用于與當前工件斷開,且針對傳送帶上的下一個工件的程序已經就緒。使工件下落意味著編碼器單元不再跟蹤工件。從工件隊列移除工件,且無法恢復。
指令參數:DropWObj WObj,wobj數據類型wobjdata,運動中的工件(坐標系)與指令中的機械臂位置相關。通過工件中的ufmec,指定機械單元傳送帶。
舉例:
MoveL *, v1000, z10, tool, WObj:=wobj_on_cnv1;
MoveL *, v1000, fine, tool, WObj:=wobj0;
DropWObj wobj_on_cnv1;
MoveL *, v1000, z10, tool, WObj:=wobj0;
 粵公網安備 44190002001278
粵公網安備 44190002001278





