如何創建和定義一個Tooldata數據?你知道嗎
時間:2021-04-27 16:11
來源:
Tooldata數據的創建與設定
本節智通自動化培訓專家將介紹如何創建和定義一個Tooldata數據,用于描述工具的工具坐標系和工具負載的物理特征。我們以創建一個名為Newtool的工件數據來描述圖5-20所示的工具坐標系和負載特征,演示如何通過創建工具數據來定義工具坐標系。創建tooldata數據并用直接輸入法定義工具特征的操作步驟是:1單擊【ABB菜單】—2單擊【手動操縱】—3單擊【工具坐標系】—4單擊【新建】—5輸入名稱“Newtool”—6單擊【確定】—7選中“Newtool”—8單擊【編輯】—9單擊【更改值】—10在對應項上填入圖5-20中所示的值—11單擊【確定】。詳細的操作圖示見圖5-21~圖5-27。
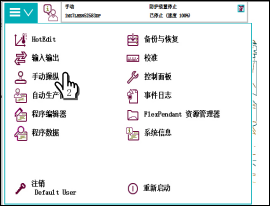
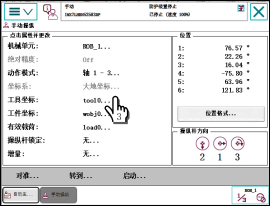
圖5-21 圖5-22 圖5-23
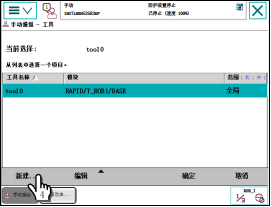
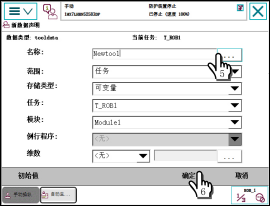
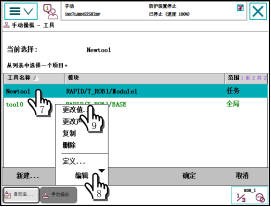
圖5-24 圖5-25 圖5-26
|
|
|
|
|

|
工業機器人培訓專家溫馨提醒:工件的重量mass一項的值必須大于零,否則控制系統會發出如圖5-28所示的錯誤警告;工件的重心cog.x、cog.y、cog.z三項的值不能同時為零,否則在運行使用該工具坐標系的運動指令語句時機器人系統會報如圖5-29所示的錯誤。
圖5-28 圖5-29
對于多點法定義工具坐標系位置,所使用的點數越多則精度越高,當然操作過程所需花費的時間也就越長。確定工具坐標系姿態可以選擇的方法有:
(1)“TCP(默認方向)” 即與tool0中工具坐標系的姿態相同,工具坐標系Z軸垂于機器人6軸法蘭平面,指向法蘭外側;
(2)“TCP和Z” 即通過指定一個點作為工具坐標系Z軸負半軸上的點來確定工具坐標系的Z軸方向,工具坐標系其他軸的方向由系統確定;
(3)“TCP”和Z,X 即通過指定兩個分別點作為工具坐標系Z軸負半軸上的點和X軸負半軸上的點,來確定工具坐標系的Z軸方向和X軸方向,此時工具坐標系的Y軸方向也是確定的了,無需再指定,可以通過“右手法則”指示出工具坐標系Y軸的方向。
 粵公網安備 44190002001278
粵公網安備 44190002001278





