東莞自動化培訓專家為你解析MoveC指令
時間:2021-04-21 17:37
來源:
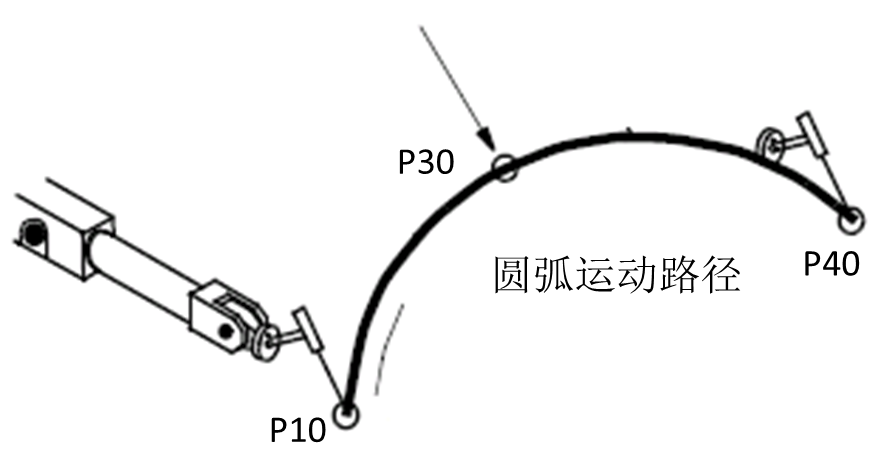
MoveC指令,中文名稱作圓弧運動指令。工業機器人培訓老師表示,MoveC指令可通過已知的三點確定一段圓弧軌跡。已知三點是指:圓弧的起點、圓弧上的點、圓弧的終點。圓弧的起點是前一條運動指令的停止點,圓弧上的點和圓弧的終點由圓弧運動指令來指定。如果圓弧起點和圓弧終點的TCP姿態相同,則在圓弧運動期間,TCP姿態保持不變。如果圓弧起點和圓弧終點的TCP姿態不同,那么在執行圓弧指令期間,沿路徑調整姿態的準確性僅取決于圓弧起點和圓弧終點處的姿態,運動過程中姿態的調整與圓弧上的點的姿態無關。
MoveC指令的指令格式如下:
MoveC CirPoint,ToPoint,Speed,Zone,Tool;
1)MoveC指令代碼
2)CirPoint圓弧上的點,存儲一個robtarget型數據
3)ToPoint圓弧終點,存儲一個robtarget型數據
4)Speed移動速度
5)Zone轉彎半徑
6)tooL工具編號
例:MoveC p1, p2, v500, z30, tool2;
工具tool2的TCP沿圓弧移動至位置p2,其速度數據為v500 且轉彎半徑區域數據為z30。根據起始位置、圓周點p1和目的點p2,確定該圓弧。圓弧運動指令的運動軌跡示意,如圖4-83所示:
MoveC指令的指令格式如下:
MoveC CirPoint,ToPoint,Speed,Zone,Tool;
1)MoveC指令代碼
2)CirPoint圓弧上的點,存儲一個robtarget型數據
3)ToPoint圓弧終點,存儲一個robtarget型數據
4)Speed移動速度
5)Zone轉彎半徑
6)tooL工具編號
例:MoveC p1, p2, v500, z30, tool2;
工具tool2的TCP沿圓弧移動至位置p2,其速度數據為v500 且轉彎半徑區域數據為z30。根據起始位置、圓周點p1和目的點p2,確定該圓弧。圓弧運動指令的運動軌跡示意,如圖4-83所示:
 粵公網安備 44190002001278
粵公網安備 44190002001278





