什么是MoveJ指令?機器人培訓的老師在本文為您詳解!
時間:2021-04-20 11:11
來源:
什么是MoveJ指令?東莞自動化培訓專家解釋說,“MoveJ指令,中文名稱作關節運動指令,它可以使機械臂沿非線性路徑運動至目標位置。到達目標位置時,所有軸均同時達到。當無需精確控制運動軌跡時,使用MoveJ指令可比使用其他指令更迅速地將機械臂迅速地從一點移動至另一點。使用MoveJ指令編程時,點到點之間的軌跡由機器人控制器計算生成,編程人員不易預見機器人的運動軌跡。”
將工具的工具中心點tool2沿非線性路徑移動至位置p1,其速度數據為用戶預定義的speeddata型數據vmax,且轉角半徑數據為z30。
關節運動指令的運動軌跡示意,如圖4-81所示:
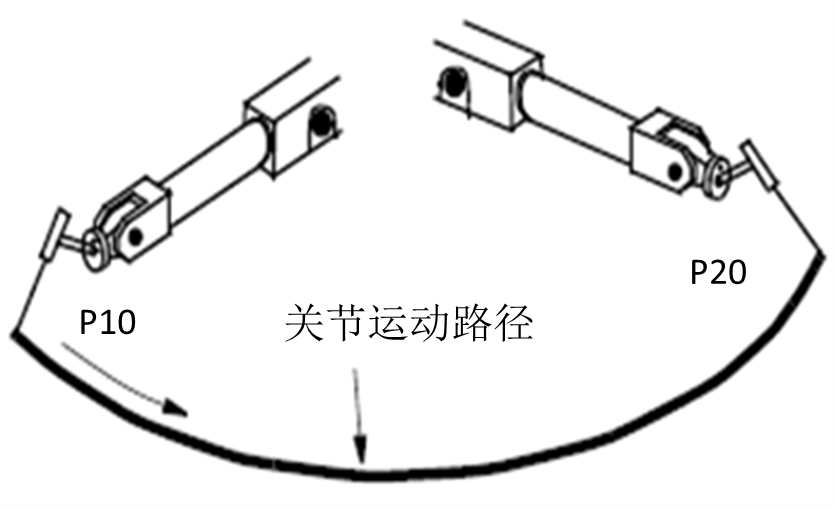
圖4-81
MoveJ指令的指令格式如下:
MoveJ ToPoint,Speed,Zone,Tool;1)MoveJ指令代碼
2)ToJointPos運動目標點,存儲一個位置數據
3)Speed移動速度
4)Zone轉彎半徑
5)tooL工具編號
將工具的工具中心點tool2沿非線性路徑移動至位置p1,其速度數據為用戶預定義的speeddata型數據vmax,且轉角半徑數據為z30。
關節運動指令的運動軌跡示意,如圖4-81所示:
圖4-81
MoveJ指令與其他運動指令一樣,有可選變量可供使用。一些常用的可選變量的具體將在后續章節予以介紹,可選變量的啟用與停用操作步驟請參考“4.3.1創建我的第一個RAPID程序”這一章節。
 粵公網安備 44190002001278
粵公網安備 44190002001278





